Objectives: At the end of this lesson, you
should be able to:
1. Create a matrix from a linear system
2. Identify the various kinds of matrices we can create from them.
3. Define Gaussian Elimination within matrices
4. Apply Gaussian Elimination to a matrix. |
Remember synthetic division ? It made
polynomial division
simpler by relying only on the position of the various degrees of
the variable.It’s not an uncommon practice
in math to let position dictate size,
degree or otherwise relate to a number such as a coefficient. We
do it with numbers all the time. That’s how we know that 10001
is a lot more than 101.
We do exactly the same thing with linear systems .
Think back to
all of our Gaussian Conventions. We always said we would add
or otherwise combine the columns of like variables. If we just
drop out the variables, we create an array of coefficients or
constants .
As long as we don’t jumble the order on any row,
position alone
should allow us to do the various row operations .
You may have already done this in the set-up for
linear
optimization. However, it won’t hurt to review the process.
|
Matrix Numbering Conventions
We describe positions in the
matrix by the row then the column. So a11 is the
value in the first row and first column while

would be the value in the mth row and 3rd
column.
The size of a matrix is the number of rows then
the number of columns. If a matrix had
 as its
as its
last entry (right, lowest ), it would called a 4 by
3 matrix (abbreviated 4 ×3). The general form is
described as an m× n matrix.
By the way, if you wonder why Johnny can’t
learn, notice that there is little consistency in
whether we use the (...) or [...] to surround the
matrix. Either is acceptable. |
Gaussian Elimination in Matrices
Take a look at this system:
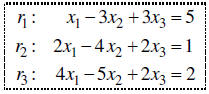
Rectangular arrangements of numbers are called matrices.
(Matrix is the singular). We can create a number of
arrays from this system. Suppose we decide to just look at the coefficients. The
system creates all of these
matrices:
We would create the coefficient matrix related to the
system. We could create the matrix of only the variables,
aptly named the variable matrix. Or, we could create the constant matrix. Each
of these has use in working with
systems and the related matrix forms.
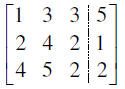
The last special form is called the augmented matrix. This
is the variable matrix augmented by the constant
matrix. By the position of values we can relate back to the variable. An
augmented matrix is identifiable because
we usually place a dotted vertical line where the equal sign would be. Hear’s
some more good news. You
already know everything useful about working with an augmented matrix. We would
transform this matrix to a
solution matrix by exactly the same conventions we used in the system.
| Using the Augmented Matrix |
Let’s solve this system through the augmented matrix. I
choose to eliminate (zero out) the entries in the first
column below the first row.
By observation, I decided to use the linear combinations
below.

So far so good, we have a nice process going. Notice also that I did two steps
at once. Since I wasn’t going to
interact rows 2 and 3, it wasn’t that hard to manipulate both at once.
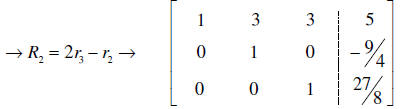
Now again by observation I see that I can eliminate the
 entry using the
linear combination below.
entry using the
linear combination below.
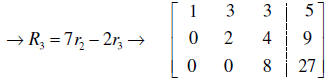
Finally, to make my life easier, I’ll scale each row to get the staircase of
one’s on the diagonal.
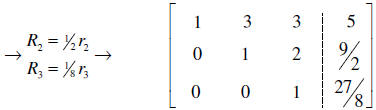
You should recognize this as the row echelon form. From here we could
back- substitute to reach the solution.
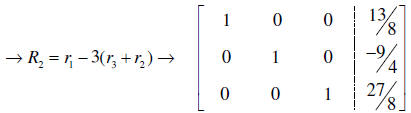
However, I want to take this to the reduced row echelon form. From that form we
can read the solution to the
original system. Let’s start from the bottom since it has zeros in all but the
last position.
At the risk of burning out an already stressed brain, I going to zero out both
 and
and  . I can do this because
. I can do this because
both elements have a 3 value. Otherwise this might take a couple of steps .
Notice the linear combination uses all
three rows. Neat!
The solution is now readable as the ordered triple
Here’s where we get into the wonderful world of answer display.
This solution can also be reflected as the column matrix to the right. (A column
matrix has a
single column.) However, the appropriate way to interpret this is by realizing
that it is supposed
to be juxtaposed with the variable matrix as shown.
Also notice that I did revert to an exact decimal representation . The arithmetic
in this problem could have been
done totally in decimal. However, had we divisors of 3, 7, 11 or other
irritating denominators that create
repeating decimals, the work must be done using rational fractions . Bad things
happen otherwise.
Using Gaussian Elimination processes within an augmented matrix is modestly
simpler
than using the original system since we don’t need to reproduce all the
variables.
However, this is still a time consuming process for large systems, even with
only 4 or 5
variables. In the next lesson we will use the other matrix forms, coefficient,
variable and
constant, to develop better methodologies for large systems. |