a) Linear transformations
Suppose you take every vector (in 3 dim. Space) and
multiply it by 17, or you rotate every vector
by 39° about the z-axis, or reflect every vector in the x-y-plane - these are
all examples of
LINEAR TRANSFORMATIONS .
A linear transformation (T) takes each vector in a vector space and
“transforms” it into some
other vector.

with the provision, that the operation is linear (see Definition linear
operator -> our operators are
linear transformations)

If we know what a particular linear transformation does to a set of BASIS
vectors (they span the
vector space), one can easily figure out what it does to ANY vector.

If I choose this form, the vector is in form of a row vector.
If
 is an arbitrary vector :
is an arbitrary vector :
Evidently T takes a vector with components
 into a vectpr with components
into a vectpr with components
Thus the n2 ELEMENTS Tij uniquely characterize the linear transformation T
(with respect to a
given basis ) just as the n components ai uniquely characterize the vector
(with
respect to the
same basis)
If the basis is orthonormal
The study of linear transformations reduces then to the theory of matrices.
SUM :

match the rule for adding matrices
PRODUCT :
 Net effect of performing them in succession, first T, then S.
Net effect of performing them in succession, first T, then S.
Which matrix A represents the combined transformation ?
The components of a given vector depend on your (arbitrary) choice of basis
vectors, as do the
elements in the matrix representing a linear transformation.
We might inquire how these numbers change , when we switch to a different basis.
The new basis
vectors,
 , are - like ALL vectors - linear combinations of the old ones.
, are - like ALL vectors - linear combinations of the old ones.
This is ITSELF a linear transformation ( Compare (8.2.3)), and we know
immediately how the
components transform:
where the superscript indicates the basis.
In matrix form

What about the matrix representing a given linear transformation, T ?
In the old basis we had

and from (8.2.11) we obtain after multiplying both side by U-1
Note that U-1 certainly exists - if U were singular, then the
would not span the space, so
they would not constitute a basis.

Evidently
In general, two matrices (T1 and T2) are said to be SIMILAR, if T2 = UT1U-1
for some (non singular) matrix U.
What we have just found is, that similar matrices represent the same linear
transformation
with respect to two different bases .
If the first basis is orthonormal, the second one will also be orthonormal, if
and only if the
matrix U is unitary. Since we always work in orthonormal bases, we are
interested mainly in
unitary similarity transformations.
While the ELEMENTS of the matrix representing a given linear transformation may
look very
different in the new basis, two numbers associated with the matrix are unchanged
: the
determinant and the TRACE.
The determinant of a product is the product of the determinants, and hence

And the TRACE, which is the sum of the diagonal elements
has the property that

(For any two matrices T1 and T2 ), so that

For an orthogonal transformation
 If we had assumed vectors with complex
If we had assumed vectors with complex
components, with the norm

we would have a unitary transformation instead of an orthogonal one.

A very important unitary transformation is the one of a Hermitian matrix into
a diagonal matrix.

EIGENVECTORS AND EIGENVALUES.
Consider the linear transformation in 3-dim. space consisting of a rotation
about some specified
axis by an angle θ. Most vectors will chnage in
arather complicated way (they ride around on a
cone about the axis), but vectors that happen to lie ALONG the axis have a very
simple
behavior : They don’t change at all
 then vectors, which lie in the
then vectors, which lie in the
“equatorial” plane reverse sign,
 . In a complex vector space, EVERY linear
. In a complex vector space, EVERY linear
transformation has “special” vectors like these, which are transformed into
simple multiples of
themselves:

{This is NOT always true in REAL vector space (where the scalars are
restricted to real values )}
They are called EIGENVECTORS of the transformation, and the (complex) number
, λ , is their
EIGENVALUE.
The NULL vector does not count, even though, in a trivial sense, it obeys
(8.2.18) for ANY T
and λ, an eigenvector is any NONZERO vector satisfying
(8.2.18)
Notice that any (nonzero) multiple of an eigenvector is still an eigenvector
with the same
eigenvalue.
With respect to a particular basis, the eigenvector equation has the matrix form
 (8.2.19) (for nonzero
(8.2.19) (for nonzero
 or
or

Here 0 is the ZERO MATRIX, whose elements are all zero .
Now, if the matrix (T - λI) had an inverse, we
would multiply both sides of (8.2.20) by
 and conclude that
and conclude that

But by assumption
 is not zero, so the matrix (T - λI) must in fact be
singular, which means
is not zero, so the matrix (T - λI) must in fact be
singular, which means
that the determinant vanishes.

SECULAR or CHARACTERISTIC EQUATION
This yields an algebraic equation for λ of nth order,
where the coefficients depend on the elements
of T. Its solution determines the eigenvalues. nth order equation -> n (complex)
roots.
(It is here that the case of real vector spaces becomes
more awkward, because the
characteristic equation need not have any (real) solutions at all)
However, some of these may be duplicates, so all we can
say for certain is, that an n x n matrix
has AT LEAST ONE and MOST n DISTINCT eigenvalues. To construct the corresponding
eigenvectors it is generally easiest simply to plug each λ back into
(8.2.19) and solve “by hand”
for the components of 
A matrix can be diagonalized, if it is either
1) unitary
2) hermitian
or 3) all eigenvalues are different.
Now, I show an example
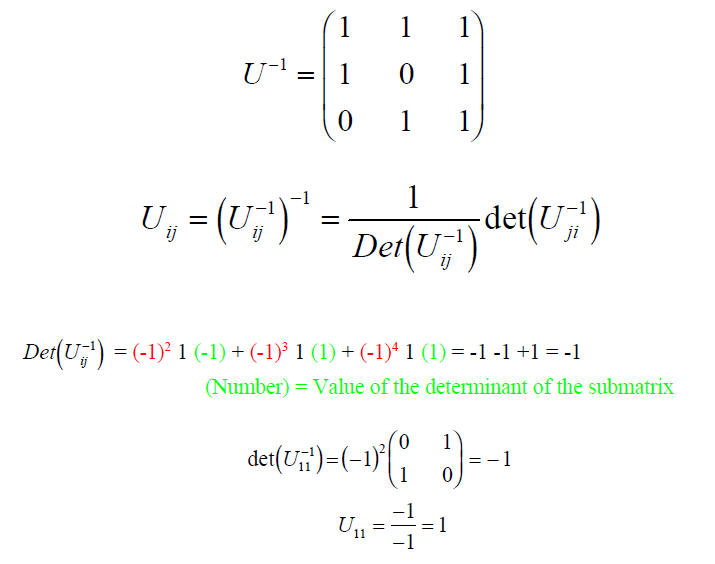
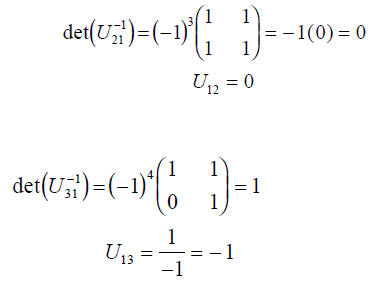
Diagonalization of a Matrix
Task to find U and U-1

SECULAR or CHARACTERISTIC EQUATION
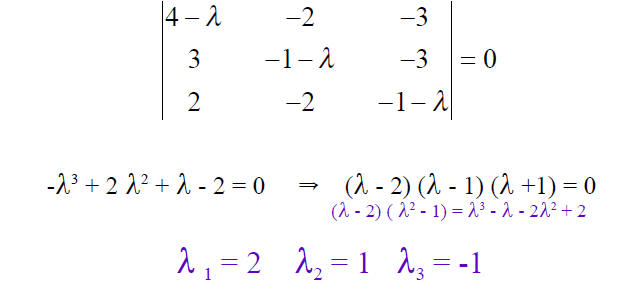
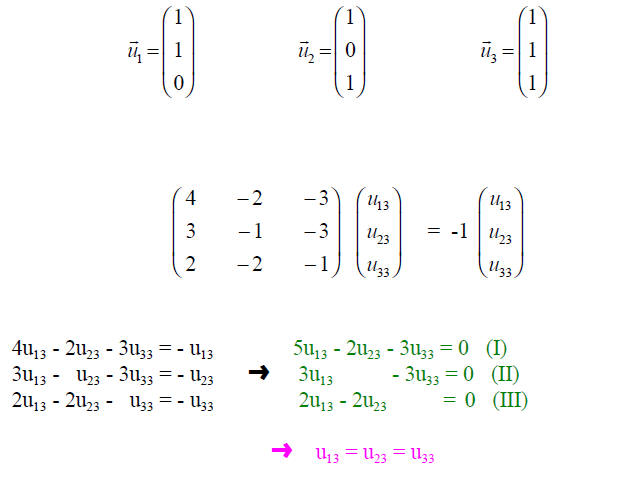
The eigenvectors are:
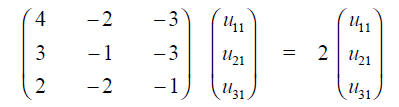
I use here the second index to indicate to which
eigenvalue (1,2,3) the eigenvector u
belongs



Analog
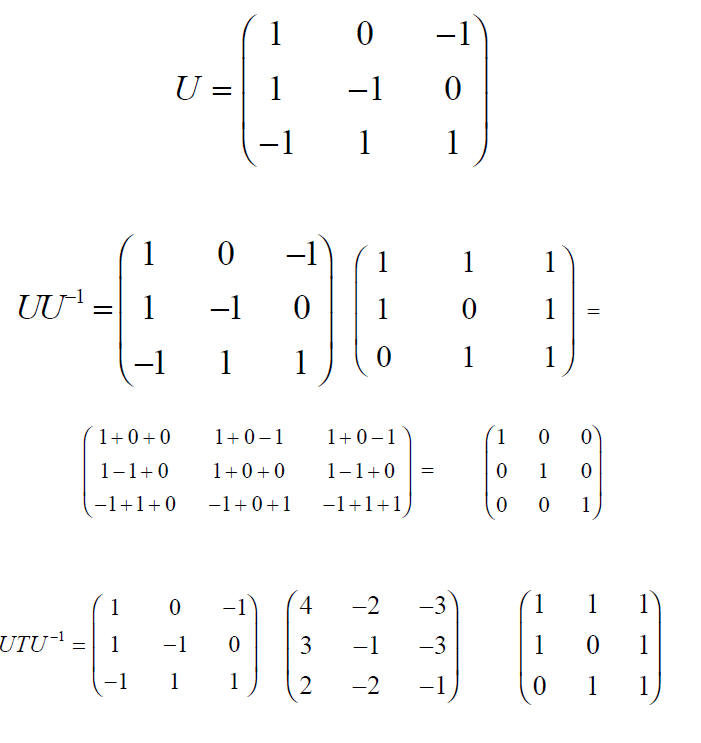
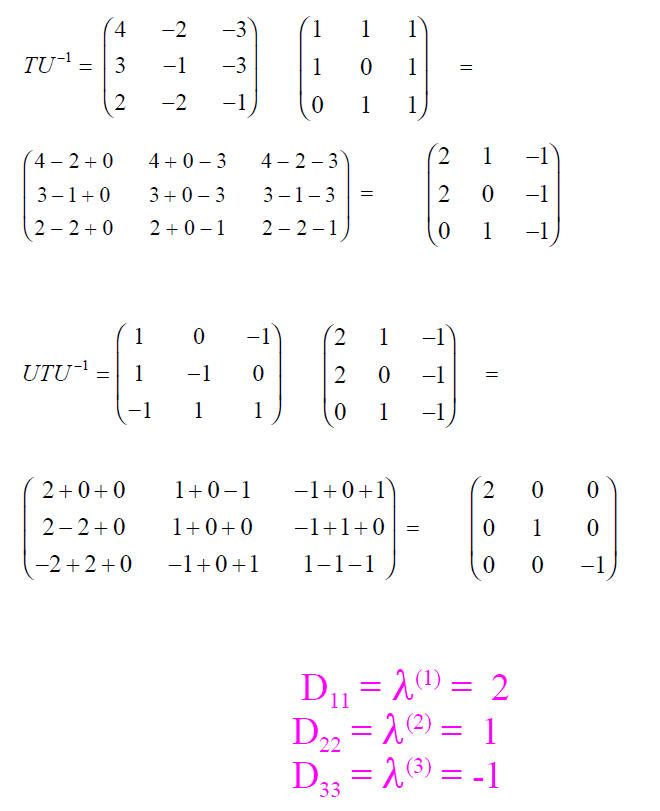
If we ask ourselves which matrix will achieve the
diagonalization of T , we find that
the matrix which accomplishes the transformation can be constructed by using the
eigenvectors as the columns.
etc
The Schroedinger eigenvalue problem
can be converted easily into the matrix eigenvalue form
In order to see this, we expand
 using an arbitrary complete orthonormal set
using an arbitrary complete orthonormal set

We multiply from the left with
 and integrate
and integrate