Abstract
This article, aimed at a general audience of computational scientists,
surveys the Cholesky factorization for symmetric positive definite
matrices, covering algorithms for computing it, the numerical
stability of the algorithms, and updating and downdating of the factorization.
Cholesky factorization with pivoting for semidefinite matrices
is also treated.
Keywords: Cholesky factorization, Cholesky decomposition, symmetric
matrix,
positive definite matrix, positive semidefinite matrix, complete pivoting,
partitioned
algorithm, level 3 BLAS, downdating, updating, stability, rounding error
analysis
AMS subject classifications. 65F05, 15A23
Introduction
A symmetric n×n matrix A is positive definite if the quadratic form xTAx
is
positive for all nonzero vectors x or, equivalently, if all the eigenvalues of A
are
positive. Positive definite matrices have many important properties , not least
that they can be expressed in the form A = XTX for a nonsingular
matrix X.
The Cholesky factorization is a particular form of this factorization in which
X is upper triangular with positive diagonal elements; it is usually written
A = RTR or A = LLT and it is unique. In the case of a
scalar (n = 1), the
Cholesky factor R is just the positive square root of A. However, R should in
general not be confused with the square roots of A, which are the matrices Y
such that A = Y 2, among which there is a unique symmetric positive
definite
square root, denoted A1/2 [9, Sec. 1.7].
The Cholesky factorization (sometimes called the Cholesky decomposition)
is named after Andr´e-Louis Cholesky (1875–1918), a French military
officer involved in geodesy [3]. It is commonly used to solve the normal
equations A TAx = AT b that characterize the least squares
solution to the
overdetermined linear system Ax = b.
A variant of Cholesky factorization is the factorization A = LDLT ,
where
L is unit lower triangular (that is, has unit diagonal) and D is diagonal. This
factorization exists and is unique for definite matrices. If D is allowed to
have nonpositive diagonal entries the factorization exists for some (but not
all) indefinite matrices. When A is positive definite the Cholesky factor is
given by R = D1/2LT .
Computation
The Cholesky factorization can be computed by a form of Gaussian elimination
that takes advantage of the symmetry and definiteness. Equating (i, j)
elements in the equation A = RTR gives
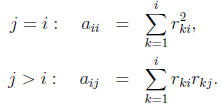
These equations can be solved to yield R a column at a
time, according to
the following algorithm:
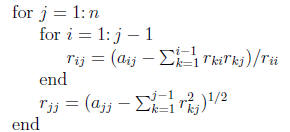
The positive definiteness of A guarantees that the
argument of the square
root in this algorithm is always positive and hence that R has a real , positive
diagonal. The algorithm requires n3/3+O(n2) flops and n
square roots, where
a flop is any of the four elementary scalar arithmetic operations +,−, ∗, /.
The algorithm above is just one of many ways of arranging Cholesky
factorization, and can be identified as the “jik” form based on the ordering of
the indices of the three nested loops. There are five other orderings, yielding
algorithms that are mathematically equivalent but that have quite different
efficiency for large dimensions depending on the computing environment,
by which we mean both the programming language and the hardware. In
modern libraries such as LAPACK [1] the factorization is implemented in
partitioned form, which introduces another level of looping in order to extract
the best performance from the memory hierarchies of modern computers. To
illustrate, we describe a partitioned Cholesky factorization algorithm. For a
given block size r, write

where A11 and R11 are r×r. One step
of the algorithm consists of computing
the Cholesky factorization 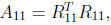 solving the
multiple right -hand side
solving the
multiple right -hand side
triangular system  for R12, and
then forming the Schur complement
for R12, and
then forming the Schur complement
 ; this procedure is repeated on S. This
partitioned
; this procedure is repeated on S. This
partitioned
algorithm does precisely the same arithmetic operations as any other variant
of Cholesky factorization, but it does the operations in an order that permits
them to be expressed as matrix operations. The block operations defining
R12 and S are level 3 BLAS operations [4], for which efficient computational
kernels are available on most machines. In contrast, a block LDLT
factorization
(the most useful form of block factorization for a symmetric positive
definite matrix) has the form A = LDLT , where
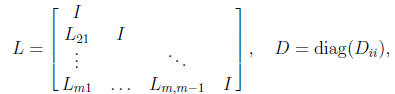
where the diagonal blocks Dii are, in general,
full matrices. This factorization
is mathematically different from a Cholesky or LDLT factorization (in
fact,
for an indefinite matrix it may exist when the factorization with 1×1 blocks
does not). It is of most interest when A is block tridiagonal [8, Chap. 13].
Once a Cholesky factorization of A is available it is
straightforward to
solve a linear system Ax = b. The system is RTRx = b, which can be
solved
in two steps , costing 2n2 flops:
1. Solve the lower triangular system RT y = b,
2. Solve the upper triangular system Rx = y.
Numerical Stability
Rounding error analysis shows that Cholesky factorization has excellent
numerical
stability properties. We will state two results in terms of the vector
2-norm  and corresponding subordinate matrix
norm
and corresponding subordinate matrix
norm
 where for symmetric A we have
where for symmetric A we have
 :
:
λi is an eigenvalue of A}. If the factorization runs to completion in
floating
point arithmetic, with the argument of the square root always positive, then
the computed  satisfies
satisfies

where a subscripted c denotes a constant of order 1 and u
is the unit roundoff
(or machine precision). Most modern computing environments use IEEE
double precision arithmetic, for which u = 2-53 ≈ 1.1×10-16.
Moreover, the
computed solution  to Ax = b satisfies
to Ax = b satisfies

This is a backward error result that can be interpreted as
saying that the
computed solution is
the true solution to a slightly perturbed problem.
The factorization is guaranteed to run to completion if

where is the matrix condition number with
respect
is the matrix condition number with
respect
to inversion. By applying standard perturbation theory for linear systems to
(3) a bound is obtained for the forward error:
The excellent numerical stability of Cholesky
factorization is essentially
due to the equality  which guarantees that R
is of
which guarantees that R
is of
bounded norm relative to A. For proofs of these results and more refined
error bounds see [8, Chap. 10].
Semidefinite Matrices
A symmetric matrix A is positive semidefinite if the quadratic form xTAx
is
nonnegative for all x; thus A may be singular. For such matrices a Cholesky
factorization A = RTR exists, now with R possibly having some zero
elements
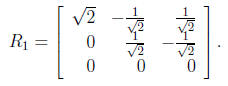
on the diagonal, but the diagonal of R may not display the rank of A. For
example,

and A has rank 2 but R has only one nonzero diagonal
element. However,
with P the permutation matrix comprising the identity matrix with its
columns in reverse order,  , where
, where
More generally, any symmetric positive semidefinite A has
a factorization

where P is a permutation matrix, R11 is r×r
upper triangular with positive
diagonal elements, and rank(A) = r. This factorization is produced by using
complete pivoting, which at each stage permutes the largest diagonal element
in the active submatrix into the pivot position. The following algorithm
implements Cholesky factorization with complete pivoting and overwrites
the upper triangle of A with R. It is a “kji” form of the algorithm.
Set pi = 1, i = 1: n.
for k = 1: n
Find s such that
Swap rows and columns k and s of A and swap pk and ps.

for j = k + 1: n
akj= akj/akk
end
for j = k + 1: n
for i = k + 1: j
aij= aij − akiakj
end
end
end
Set P to the matrix whose jth column is the pjth column of I.
An efficient implementation of this algorithm that uses level 3 BLAS [6] is
available in LAPACK Version 3.2. Complete pivoting produces a matrix R
that satisfies the inequalities

which imply r11 ≥ r22 ≥ · · · ≥ rnn.
An important use of Cholesky factorization is for testing whether a symmetric
matrix is positive definite. The test is simply to run the Cholesky
factorization algorithm and declare the matrix positive definite if the
algorithm
completes without encountering any negative or zero pivots and not
positive definite otherwise. This test is much faster than computing all the
eigenvalues of A and it can be shown to be numerically stable: the answer is
correct for a matrix A+ ΔA with ΔA
satisfying (2) [7]. When an attempted
Cholesky factorization breaks down with a nonpositive pivot it is sometimes
useful to compute a vector p such that pTAp ≤ 0. In optimization,
when
A is the Hessian of an underlying function to be minimized, p is termed a
direction of negative curvature. Such a p is the first column of the matrix
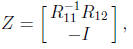
where [R11 R22 ] is the partially
computed Cholesky factor, and this choice
makes pTAp equal to the next pivot, which is nonpositive by
assumption.
This choice of p is not necessarily the best that can be obtained from Cholesky
factorization, either in terms of producing a small value of pTAp or
in terms
of the effects of rounding errors on the computation of p. Indeed this is a
situation where Cholesky factorization with complete pivoting can profitably
be used. For more details see [5].
Updating and Downdating
In some applications it is necessary to modify a Cholesky factorization A =
RTR after a rank 1 change to the matrix A. Specifically, given a vector x
such that A − xxT is positive definite we may need to compute
 such that
such that
 (the downdating problem), or given a vector
y we may need
(the downdating problem), or given a vector
y we may need
to compute such that
 For the updating problem write
For the updating problem write

We aim to use the orthogonal matrix Q to restore triangularity; thus, for
n = 3, for example, we want Q to effect, pictorially,
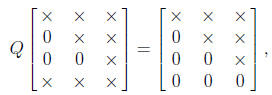
where × denotes a nonzero element. This can be achieved by
taking Q as
a product of suitably chosen Givens rotations. The downdating problem
is more delicate because of possible cancellation in removing xxT
from A,
and several methods are available, all more complicated than the updating
procedure outlined above. For more on updating and downdating see [2,
Sec. 3.3].





